
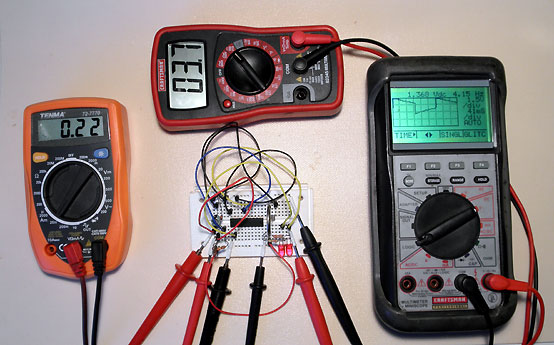

Результат следующий. При напряжении 2,6 V и тактовой частоте 1 МГц, микроконтроллер потребляет ток, около, 0,22 mA (0,00022 А). На плате «Launchpad», при той же частоте (1 МГц) и напряжении питания 3,55 V, микроконтроллер MSP430G2452 потребляет 0,35 mA, а MSP430G2553 - 0,4 mA.
Можно посчитать на сколько времени хватит двух аккумуляторов 200 mA/h (AAA) или 250mA/h (2/3 AA), если не переводить микроконтроллер в режим пониженного энергопотребления. Но из практики, двух аккумуляторов с верхней фотографии хватает больше, чем на месяц непрерывной работы.
Остается посмотреть с какого напряжения начинает работать микроконтоллер.
Данный микроконтроллер MSP430G2452, при:
1,5V – не работает,
1,55V – начинает работать, но неустойчиво.
1,6V – уже работает.
По данным TI (Texas Instruments), минимальное рабочее напряжение – 2,2V. Ядро будет продолжать работать до напряжения 1,8V, но при этом не гарантируется запись в энергонезависимую память (EEPROM). Максимально допустимое напряжение - 3,9V (4,2V) и этого мы проверять не будем.
Но вернемся к результатам. Как видно на фотографии, осциллограф (справа) измеряет частоту импульсов (на выходе P1.0). Частота переключения светодиодов, около 4 Гц. Таким образом микроконтроллер формирует импульсы, длинной, около 120 mS (0,12 секунды). Программа формирует задержку в цикле do-while, с начальным значением счетчика i = 10000. Вопрос следующий. Какую максимальную частоту можно получить на выходе микроконтроллера, и как влияет длинна цикла задержки ( i = ??? ) на эту частоту?
Но в начале вернемся к программированию.
Подпрограммы или как это выглядит.
Написать большую программу одним куском – невозможно, а маленькую – проблематично. Поэтому её приходится разбивать на маленькие, независимые модули (подпрограммы), а потом стыковать все вместе. Ниже – пример, как наша программа, которая мигает светодиодами, превращается в подпрограмму. Эту конструкцию (выделено) надо запомнить и применять именно так. Иначе, компилятор Вас не поймет.

С точки зрения программирования, переменные бывают глобальные и локальные. Глобальные, объявляются перед программой main, живут постоянно и «видны» всем подпрограммам и функциям. Локальные переменные (временные), объявляются в теле программ, подпрограмм, циклов и т.д. и существуют только во время их работы. То есть, переменная i, в цикле do-while, исчезнет, как только цикл закончится, и появится снова при следующем использовании цикла.
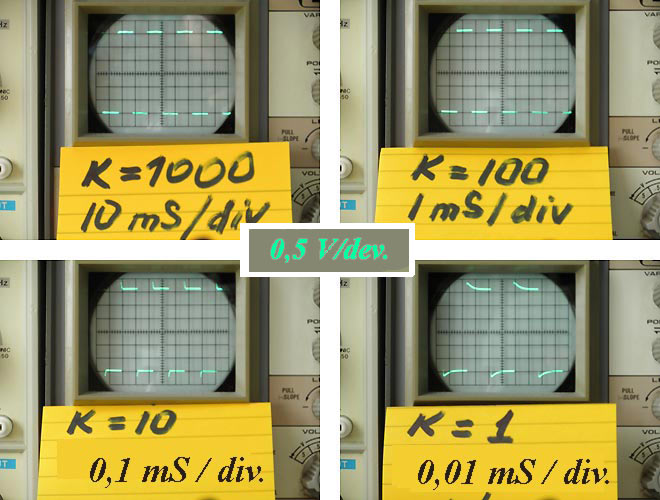
Вернемся к длительности импульсов на выходах портов P1.0 и P1.6 . Результаты для счетчиков цикла k = i = 1000, 100, 10 и 1 – на фотографии ниже. Результат для k = i = 10000 - 4,15 Гц, Вы могли видеть в начале страницы.
Так же, было интересно узнать какую максимальную частоту (минимальную длину импульсов) можно получить. Для этого надо убрать цикл do-while. После этого, инверсия состояния битов порта P1 будет происходить, только, в бесконечном цикле for(;;).
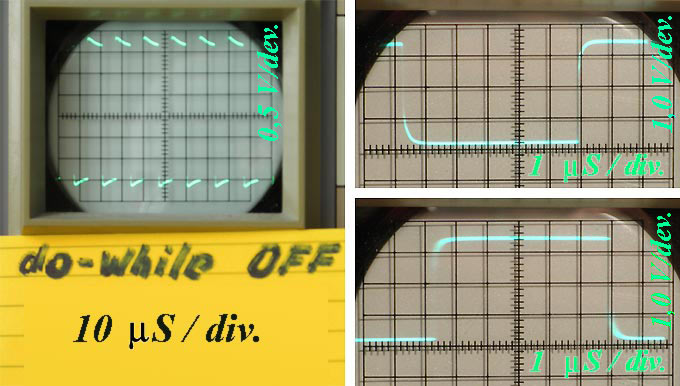
Для микроконтроллера MSP430G2452, (работающем на внутренней частоте 1 МГц*, при напряжении питания 3,55V) удалось получить импульсы с длительностью около 5,5 мкс. Таким образом, частота следования импульсов - около 90 кГц. Я думаю, что это неплохой результат для 16-ти битного микроконторллера, при токе потребления 0,35 мА.
Итак, что мы узнали.
1. Плату «Launchpad» можно использовать как программатор для микросхем MSP430Gxxxx. При этом, запрограммированная микросхема прекрасно работает отдельно (и без кварцевого резонатора!). То есть проблему с программатором мы сняли.
2. Основная программа легко разбивается на подпрограммы. Это немного улучшает «читаемость» и «вспоминаемость». Но главное, что это позволяет набирать сложную программу из отдельных подпрограмм (часто не своих).
3. Благодаря тому, что «Техас Инструмент» продумал систему сброса (по питанию), мы можем использовать микроконтроллер не задумываясь о внутренней конфигурации (как «черный ящик»). То есть, после подачи питания, в микроконтроллере включается внутренний тактовый генератор (1 МГц) и начинается выполнение программы.
4. WatchDogTimer является единственным модулем, который включается после сброса «по умолчанию». Если его не выключить строкой «WDTCTL = WDTPW + WDTHOLD;», то он будет регулярно «рестартовать» микроконтроллер, мешая нормальной работе программы. Остальные внутренние модули можно включить программно, если есть желание.
5. Мы использовали микроконтроллер MSP430Gxxxx как программный автомат. То есть программировали последовательность действий, а микроконтроллер их выполнял. Это позволило реализовать генератор прямоугольных импульсов с частотой до 90 кГц при тактовой частоте процессора 1 МГц. Добавив две команды (BCSCTL1 = CALBC1_16MHZ; DCOCTL = CALDCO_16MHZ;) можно увеличить тактовую частоту процессора до 16 МГц (выбор 1, 8, 12 или 16 МГц). Соответственно увеличится максимальная частота выходных импульсов. Согласитесь, что генератор до частоты 1,5 МГц, на одной микросхеме – это заманчиво.
Дальше.
Пользуясь логикой «программного автомата», можно написать («скопипастить») простую программу, для работы с LCD дисплеем. А дальше, на дисплей можно выводить все что угодно, текст, цифры, числа, показания вольтметра (результат работы АЦП), частоту и так далее.
«Вы можете это сделать! Это очень просто!».
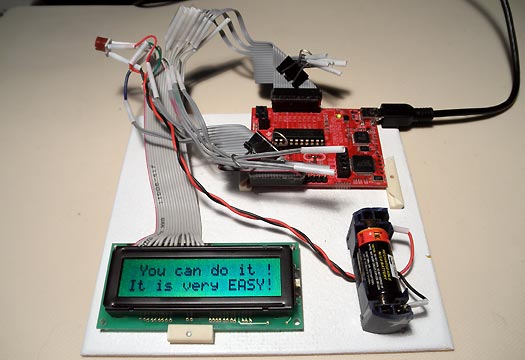
На фотографии универсальная заготовка устройства, которая УЖЕ работает. Можно превратить во что угодно (зависит от фантазии и необходимости).
На следующей странице - схема и простейшая программа, которая позволяет это сделать.