
Прикольная вещь, которая работает, какое то время.
8.12 Простейший робот-пылесос, устройство.
Три вещи, которые надо сказать в начале.
1. Я купил "это" за 5$. Если Вы собираетесь купить дороже, то "это" того не стоит.
2. "Это" действительно работает, хоть и не долго.
3. "Это" не может работать долго.
В общем то, я не отношусь к категории людей, которые думают, что можно купить "шанхайских барсов по цене сибирских тушканчиков". Да и пылесос мне не сильно нужен. Просто хотелось посмотреть что внутри.
Можно было открыть его сразу, но спортивный интерес, посмотреть как это должно работать (по мысли "создателя"), победил. После зарядки батареи устройство весело побежало по полу, делая свою работу (надо сказать неплохо и тихо). Но удовольствие закончилось на 3-й минуте. Оно продолжало ездить, но пыль уже не сосало.
Не так, что бы я сильно расстроился - теперь я его открываю по делу, а не просто так.
Мы говорим о таком "роботе", с таким разъемом для зарядки.

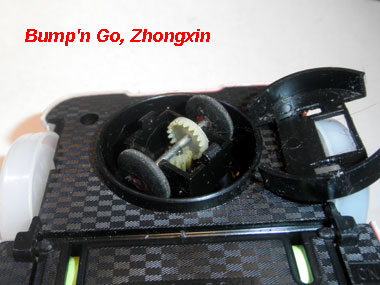
Два колеса, закрепленные на вращающейся каретке, перемещают "это" по полу. В англоязычной литературе, ходовая часть называется "Bump and Go" ("bump´n go", "gimbal rotator", or so). Остальное - внутренний дизайн, простота которого может "тянуть" на Нобелевскую Премию.


Дизайн передних, приводных колес повторяет в точности Планетоход-луноход Straume. В последнем не было пылесоса, но место для него было. Элекроника ограничивается зарядным устройством для литиевых батарей, с отключением нагрузки в случае переразряда. Выключатель подает напряжение на два двигателя включенных в паралель.


Вентилятор, мог бы быть и получше. Но он делает свою работу. И не шумит (двигатель сам по себе создает значительно больше шума, чем эта крыльчатка вентилятора).


Дальше Вы можете не читать, просто покликать на картинки. Все что нужно выше. Следующее - простая реальность.
Как это работает, в жизни.
Если Вам повезло и это работает "прямо из коробки" (аккумулятор надо зарядить), то интересно за "этим" понаблюдать.Первая неприятность заключается в том, что картридж, в котором собирается мусор, забивается за 10 минут. Ну, это при наличии только одной кошки. Так что после запуска этого "робота" Вы можете делить свое время на 10-ти минутные промежутки. "Но этого можно и не делать ..." как говорил Миша Жванецкий.
Игрушка требует абсолютно ровного пола. Она быстро находит еле-заметные впадины и начинает убирать там, игнорирую остальную часть комнаты. Это не происходит постоянно, но в них она проводит большую часть времени.
По бестолковости перемещения по полу "это" может соревноваться только с роботом Румба (iRobot vacuum cleaner, 300$ or so). Оба "наматывают" спирали по полу, даже тяжело сказать кто победит. Единстенная разница - iRobot программно бестолковый, и впадины на полу для него не имеют значения.
Не выбрасывать же, тем более, что кошке эта игрушка нравится.
Прежде всего, если Вы думаете, что я буду рассказывать как все плохо, "made in China", и так далее, то это не так. В украинском языке есть такая поговорка: "Бачили очі що купували", поэтому.
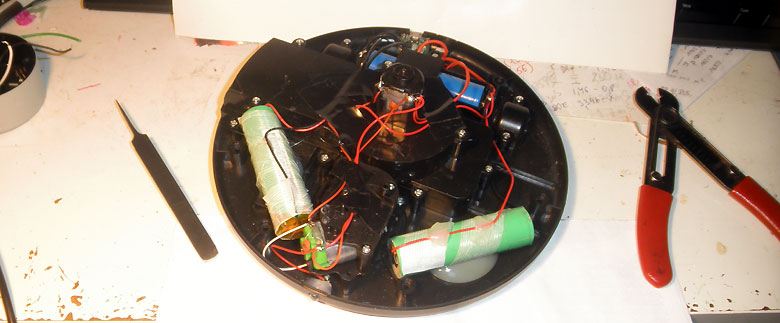
Как я уже сказал, это перестало работать на 3-минуте. Вскрытие показало - сгорел двигатель вентилятора. Не проблема его поменять. Интересно почему это произошло. Ом-метр, сопротивление мотора 0,8 Ома. Литиевый аккумулятор (3,6V) подключен к нему напрямую...

Ток должен быть около 4 Ампер. Странно, как он так долго проработал? Должен был сгореть тут-же, как предохранитель.
Самый подходящий мотор такого размера, который я нашел в своей "коллекции" имел сопротивление обмотки 2 Ома. Даже с дополнительным резистором дни этого мотора были сочтены. Кстати, его хватило на несколько часов, после чего он повторил учать первого.
После "реанимации" пылесос начал весело наматывать спирали по полу. Не долго, тк шум от задих колес, немного раздражал. Устранили это два резиновых кольца, на задних колесах. Подобие дополнительных щеток, из липкой ленты. Не плохо работают до сих пор, кстати.

Счастье продолжалось недолго. Резиновые приводные колеса забились пылью и игрушка беспомощно остановилась. Понятное дело, что чистить приводные колеса каждые 5 минут - не вариант.
Механизмы, в подобных игрушках устроены почти одинаково. Несколько из них на фото ниже. Еще один с вертикальной червячной передачей, но фото последнего найти не удалось.

Исключение составляют японские игрушки, где применено одно наклонное колесо. Но принцип тот же.

Описывать принцип смысла нет. Но все эти игрушки двигаются направлении наименьшего сопротивления, по продольной оси игрушки. С другой стороны, момент от приводной шестерни старается повернуть колесную пару. Последнее компенсируется силой трения между колесной парой и полом. В борьбе этих сил рождается дивижение игрушки.
Метода лучше, чем утяжелить перед игрушки и увеличить силу трения "колеса - пол" я не нашел (и не искал, в общем то). Спереди расположились два дополнительных 18650, что решило проблему.
О "гуманности" применения Hot Glue можно спорить часами. Но то, что на фото - уже работает. Общий уровень шума - ниже чем от фена, которым (иногда) сушат волосы.
История не заканчивается.
После переделки пылесос пробегал 2 часа (на одном заряде аккумуляторов), доставляя удовольствие кошке. И, как и ожидалось, сгорел двигатель вентилятора. Уже второй.
Тут есть некоторая проблема. Подобрать двигатель для работы от литиевого аккумулятора не так просто. Он должен быть на 4 Вольта. А стандартные двигатели для игрушек рассчитаны на 3, 6 и 12 Вольт. Тяжело поверить, что все они у меня есть, но на прямую использовать их, ну никак не получается.
Не знаю как у Вас, но у меня правило созвучное закону Мерфи. Если что то можно сделать за час, то это возьмет день, если за день - то неделю, если неделю - то это никогда не будет сделано. Так что я останавливаюсь на том, что можно сделать за час. За остальное берусь, только по работе.
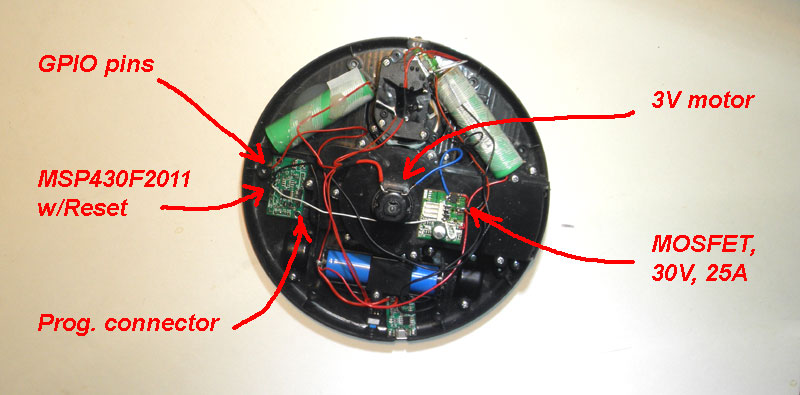
ОК. Идея использовать двигатель на 1.5V или 3V, а лишнее напряжение погасить транзистором, при помощи PWM. Выбор микроконтроллера, который будет генерировать PWM - MSP430F2011, только потому, что они у меня есть. Мощный транзистор - MOSFET, с любой материнской платы. Схема вырисовывается следующая:

То же самое можно сделать на таймере 555, но с микроконтроллером получается проще и веселее. Например, с помощью двух кнопок удобно изменять параметры PWM (ток через электродвигатель) до тех пор, пока двигатель не перестанет перегреваться.
Для программирования длинн импульсов ничего, кроме постоянной времени двигателя, знать не нужно. Последняя - отношение индуктивности обмотки (в Генри) к сопротивлению обмотки (в Омах). Результат получаестя в секундах. То есть, для моего двигателя это 0,0002 сек. Обычно это умножают на 5, те 1mS минимум. Подбор PWM, для моторов постоянного тока, хорошо описано на странице Precision Microdrives.
Остается собрать все вместе и запихать в корпус. Программировать - уже "по месту".
Никогда не думал что это смотрится так ужасно. Но закрыв крышку об это можно забыть.
Все работает, хоть и не так как это было задумано "создателем". PWM от 33 до 50% удерживает двигатель на температуре 60 - 70'C. Это не подходит для промышленного использования, но для домашнего - вполне.
Это уже работает.
Все работает - "зашибись". То есть пыль это собирает, хоть и не с первого прохода. Для кошки - игрушка отличная. Пыль и кошачья шерсть будет собрана, а мелкий мусор останется на полу. Может пылесос сдвинет мусор в сторону, но в картридж это не попадет. Просто у двигателя вентилятора, не хватает мощности.
И последнее, что бы закончить с этим "проектом".
Основной проблема - шум. К звуку работающего "пылесоса" прибавился шум от PWM и это, просто, надоело. Поэтому схема максимально упростилась до двух диодов включенных последовательно с двигателем. Это уменьшило напряжение, на двигателе, до 2,2V (при токе 0,4А). Паспортный ток, на этот двигатель - 0,4-0,45А. Теперь "это" может работать бесконечно долго.


Последняя проблема, которую нельзя устранить, видна на следующих фото, где показаны приводные колеса до и после 10 часов работы. Если коротко, то одно из них безнадежно износилось.

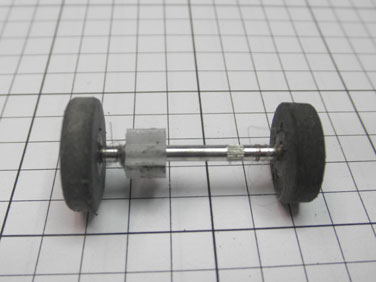
Я передвигал шестеренку несколько раз и всегда, то колесо которое дальше - изнашивается больше.
В заключение, надо сказать, что жизнь такой игрушки ограничена 10-20 часами неприрывной работы. Это отрицательный момент. Положительный заключается в том, что если сменить положение шестерни, в сторону износившегося колеса ... то механизм начинает работать правильно. Вместо непридсказуемых спиралей "это" начинает двигаться почти прямолинейно, разворачиваясь когда необходимо.
PS. Такое впечатление, что изначальный дизайн "Bump and Go" подразумевал колеса разного диаметра для компенсации крутящего момента от шестерни, которая расположена ассиметрично.
***А если Вы имеете "шо-нибудь" добавить, то мой адресс ниже.