
Sometimes, we do reverse engineering for fun.
1.6 IR remote protocol for 'Blach Spider XT' helicopter.
This IR independently controls 3 DC motors w/PWM. 2 - in one direction, and one bi-directional. Not complicated - throttle, left-right, trim, and no buttons. Coding is similar to the other two helicopters that were described in rc-toy3 and rc-toy4. So you can save some time.
'Under the hood', interesting is that the control chip 'on a free run' (works without a crystal) and is installed in an exotic way. And this is labeled, albeit under the chip : )

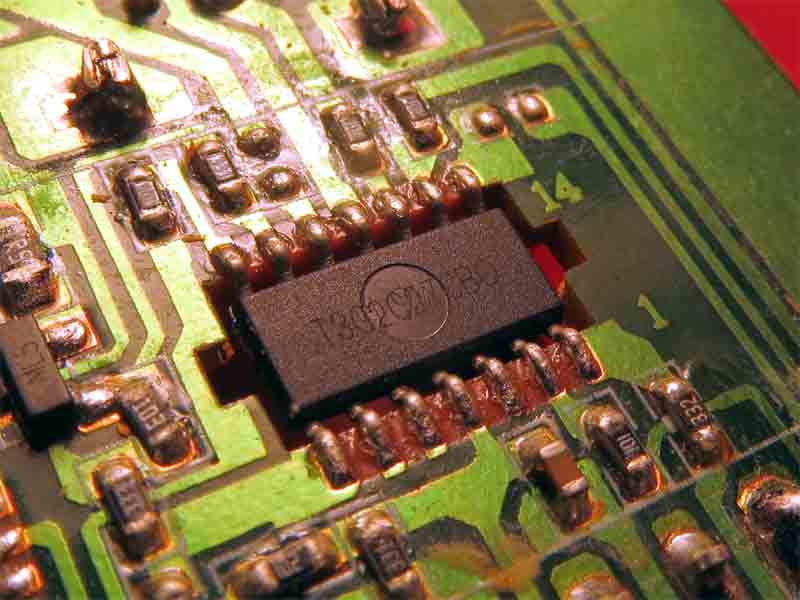
This does not coincide in pin out, with well-known microcontrollers, and most likely, the number is the firmware version.
38 kHz sub-carrier, transmits only when "throttle" 1/10 up. After releasing "throttle" it transmits codes ~16 times and goes to sleep. Interval between packages (next picture) - from 50 to 160mS.
* We watch the signal from "Infrared Receiver for Long Burst" output, similar to this one. Therefore, when there is no carrier, the level is high, when there is - low.
Next picture shows width / period / accuracy of pulses inside the package (burst). Throttle - Low, L-R - mid., Trim - Left.
The coding of "zeros" and "ones" is clear. After the start pulse (~0.8mS), any level change means the start of the transmission of a new bit. If a short pulse follows, it's '0', if a long - '1'. Following this simple rule, we can count 32 bits in the transmitted sequence. And 'zeros' and 'ones', according to pulses length.
It looks ... but after conversion to 'ones' and 'zeros' encoding starts to make sense.
The last byte - checksum (CS - last 6 bits, only). If you can determine the algorithm for CS calculation, please let me know. Thank you!
Enjoy.
*** Any inaccuracies on this page will be corrected if you let me know (e-mail is highlighted :) ***