
Sometimes, we do reverse engineering for fun.
1.6 IR remote protocol for 'Propel Stinger' helicopter.
This IR independently controls 3 DC motors w/PWM. 2 - in one direction, and one bi-directional. Not complicated at all - throttle, left-right, trim (2 buttons), and 1 additional button. Coding is similar to the other two helicopters that were described in rc-toy3 and rc-toy4, but w/o checksum.
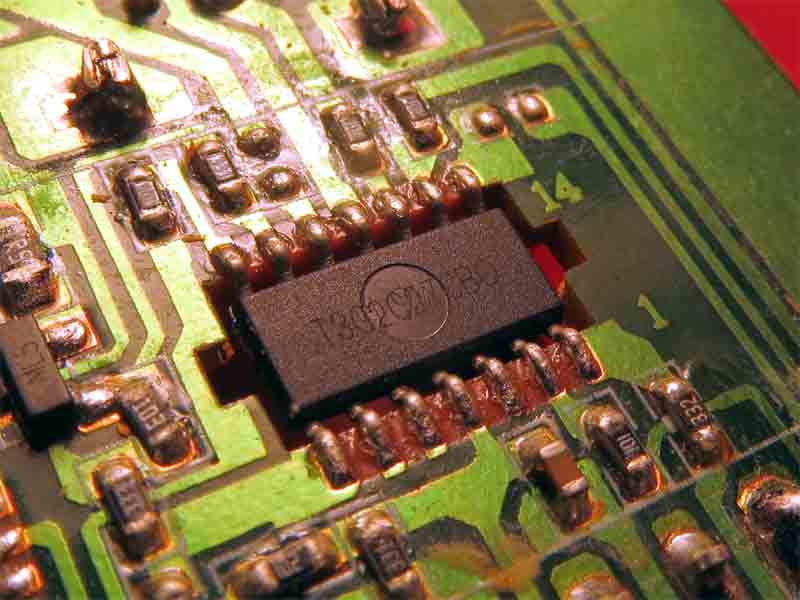
'Under the hood', control chip 'on a free run' the same (works without a crystal) and it is labeled : )
The number, under the chip, looks like firmware version.

38 kHz sub-carrier, transmits only when "throttle" 1/10 up. After releasing "throttle" it transmits codes ~30 times and goes to sleep. Interval between packages (next picture) ~135mS.
* When there is no carrier, the level is high, when there is - low.
Next picture shows width / period / accuracy of pulses inside the package (burst).
The coding. After the start pulse (~5.5mS) we can count 42 bits in the transmitted sequence. And 'zeros' and 'ones', according to pulses length.
It is no checksum in this coding! Surprise, huh?
The next is the boring work of turning all of this into a series of zeros and ones.
Having finally found out that '01' corresponds to "1", and '00' - to "zero", we get the final result.
Enjoy.
*** Any inaccuracies on this page will be corrected if you let me know (e-mail is highlighted :) ***