
Boats on RX2/TX2. No.17 for fun, No.76 - rescuer.
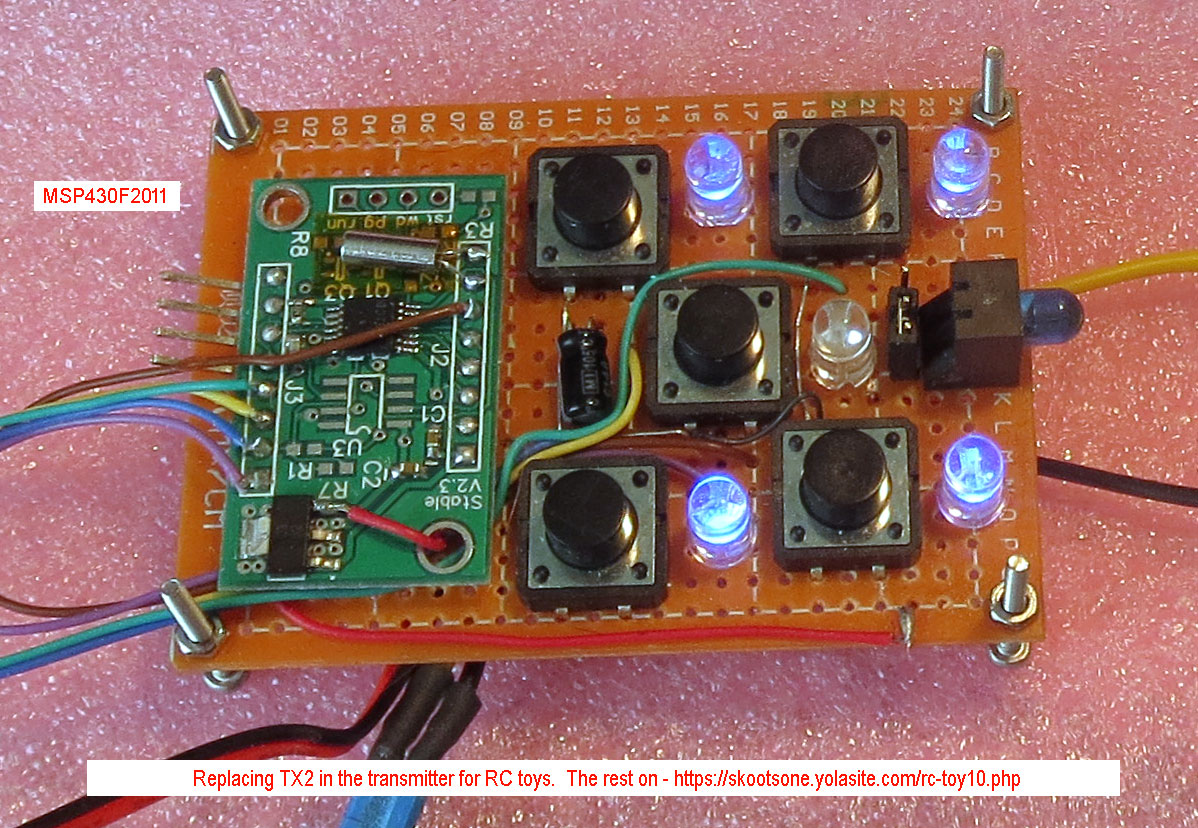
10.1 MSP430F2011 as a coder for remote control set RX/TX2.
Each of us has our own reasons to do this, so we move on.
The TX2/RX2 is a simplest set for remote control toys that has ever existed. It can take different forms, but the essence remains the same - works with buttons, only.


It is very simple to repeat on MSP430, or on any other microcontroller. Finally, you will need to connect microcontroller's output (P1.3) to the input of RF transmitter (modulator) and that’s it. Pressing each button (or several at once) will be converted to code and transmitted. My hardware solution is on the board below.
10.2 Encoding idea for RX2/TX2.
The code is broadcast continuously while the buttons are pressed. No intervals, except for the start pulses (voltage levels, on next diagrams, are inverted - Hi level is Lo, Lo is Hi).
The number of pulses after 4 start pulses means a command. Possible number of pulses: 4,10,16,22,28,34,40,46,52,58, and 64. The rest are rejected.
The following is an example (levels inverted) when a command containing 10 pulses is transmitted. Mainly for timing.
This is all you need to know. Manuals / Datasheets for chips, similar RX2/TX2, are here , here, or here !
10.3 MSP430 software for imitations of TX2.
In hardware 4 buttons to ground and output to RF transmitter. Do not forget to connect "Reset" pin to Vcc. Otherwise, the chip will work unpredictably.
After the initial setup, the MSP430F2011 goes into sleep. Only changes 'Hi to Lo' at inputs P1.4,5,6,7 will lead to wake up.
We don’t care which button was pressed. This happened and we read the state of port P1 to find out which one pressed at the moment. After, we turn the combination of buttons into number of pulses (try_to_choose ( )), and transmit them together with 4 pulses of header ( (try_to_send ( )). If the buttons continue to be pressed, then do it again, if not, then we going to sleep.
It works. Copy text file to CCS (Code Composer Studio from TI) and you know the rest.
10.4 How accurate is it?
Below is the real timing that the program generates. This is easy to compare with the diagrams that are at the top of the page. Not inverted, in this case.
And in the middle of the package.

The result is neat, more than enough. The toy (RX2 decoder) will not feel the difference : )
Enjoy.
*** Any inaccuracies on this page will be corrected if you let me know (e-mail is highlighted next :) ***